

Autonomous ocean vehicles —including autonomous underwater vehicles (AUVs), underwater gliders, drifters and autonomous surface vehicles such as Saildrone— bypass the need for expensive ship time and offer scientists improved access to the ocean, allowing them to measure and get a more complete picture of the ecosystems they work with.
Saildrone
Every Saildrone carries a comprehensive suite of science-grade instruments, each carefully selected in association with PMEL / NOAA. The sensors were chosen to cover a wide variety of science mission, focussing on air / sea interactions, surface fluxes, carbon measurements and bio-mass studies. While most missions do not require all sensors, it is possible to run all sensors simultaneously.
Deployed from a dock, Saildrones transit to the study area autonomously, averaging 3-5 knots. After the active mission, they return to shore for servicing, without needing any ship time. Missions can last 6 - 12 months, with all data streamed live via satellite and accessible via Saildrone's API.
ECOGIG has partnered with Saildrone to locate natural oil seeps in the Gulf of Mexico then adaptively sample inside and outside the seep areas. The objective is to understand the impact of natural seepage versus that of abrupt large hydrocarbon inputs on deepwater ecosystems. This effort is part of understanding long-term effects and mechanisms of ecosystem recovery from the Deepwater Horizon accident.
Saildrone #125 deployed out of Cocodrie, LA through a dense oil platform field to a seep 200 nautical miles offshore. After successfully locating the seep, confirmed by an overflight, SD #125 surveyed the area for three weeks then sailed back to its base after 1 month and ~1500 NM of autonomous deployment.
The Gulf of Mexico is an incredibly congested area with over 3000 oil platforms and many more supply ships tending these platforms. This was one of many missions completed by Saildrones in the Gulf of Mexico, demonstrating safe and precise piloting in one of the most challenging environments.
Autonomous Underwater Vehicle (AUV)
Autonomous Underwater Vehicles (AUV) are the premier tool to study large areas of seafloor systematically by scanning and imaging the seafloor from 50m or less above it, producing pixel resolutions of 1 m to 1 mm. These techniques provide high-resolution data of the benthic substrate and fauna, as well as high resolution data on subsurface processes and conduits for seeping brine, oil and gas.
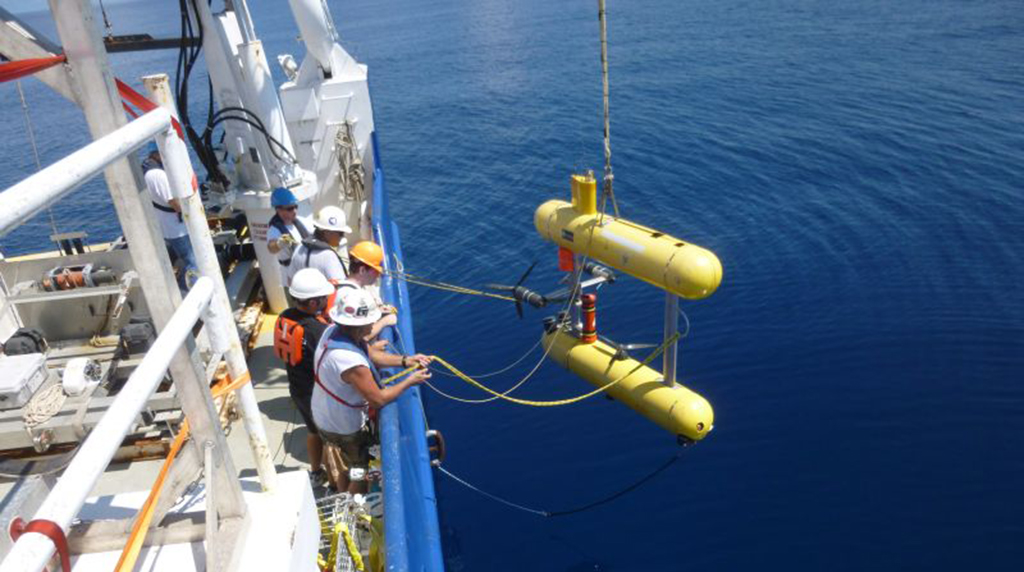
Eagle Ray, a torpedo-shaped AUV with a depth rating of 2200 meters, typically performs multibeam surveys at 50 to 15 meters above the seafloor. This AUV has both wet and dry payload space, partially occupied by its Kongsberg EM2000 multibeam sonar, SeaBird CTD, and a GeoAcoustics polarity preserving subbottom profiler.
Mola Mola, a smaller, slower, and more maneuverable hovering AUV, operates 3 meters off the seafloor and collects digital photographs from a vertically oriented camera and LED illumination system. Long Base Line Acoustic System (beacon) aids the Inertial Navigation System (INS) within Mola Mola during submerged navigation. Yellow floats are used and they differ from the USBL (ultra-short base line) system that is mounted on the AUV itself as a surface tracking device.
Used together, these AUVs provide high resolution bathymetry, sub bottom sediment structure and very high resolution photographic images of specific areas of high interest. Information from Mola Mola’s high resolution digital still camera images allow ground truthing of the multibeam seafloor data - backscatter anomalies and morphologic features - while the interpretation of the sub bottom profiling data can portray how the chemosynthetic community distribution is linked to the occurrence of hydrocarbon seeps. Bottom morphology obtained with a multibeam echosounder can reveal fault lines, pockmarks, and at higher resolution even corals colonizing hard substrates like authigenic carbonates associated with natural hydrocarbon seeps.
The USBL (Ultra Short Base Line) track link system is used to track AUVs (specifically for Eagle Ray and Mola Mola in this instance). It is mounted on the AUV itself as a surface tracking device. Scientists ping the AUV from the surface and receive a return pingback from the vehicle, from which they can calculate direction, distance, and depth. That information is then translated into a latitude/longitude position which is plotted in the software. When tracking more than one vehicle, each is given a different "address" so they can be distinguished. The USBL system is different from the LBL (long base line) system, which uses yellow floats to aid the Inertial Navigation System (INS) within MOLA MOLA during submerged navigation.
Gliders
Gliders are often outfitted with a CTD to measure temperature, salinity, and density, an optode to measure dissolved oxygen, and a sensor that measures turbidity, chlorophyll-a, and colored dissolved organic matter (CDOM) as they profile in the ocean. They are also equipped with a mobile acoustic receiver, which records signals emitted from tagged fish near the glider's path.
Neutral at the surface, the glider takes in a small volume of water through its nose, making it heavier than the water around it, and moves an internal battery forward on a rail by about an inch, which points it downward. Gravity pulls the glider down, and slender wings attached to the side provide lift that controls "flight". An altimeter in the nose and pressure sensors tell the glider when to reverse the process so that glider is lighter than the surrounding water and pointing up, and then glides to the surface using buoyancy. This highly efficient method of propulsion allows the glider to sample autonomously in the ocean for 4-6 weeks at a time on alkaline batteries.
Every 4-6 hours, the glider comes to the surface to report position, status, and a subset of the data it collects in real time. Computers on shore note the glider's position, process the data, and send it back on the mission. These regular surfacings are also an opportunity to adjust the glider's mission based on satellite data, information from ocean models, or even the data that it's just collected. The data sent to shore in real time are also sent to the NOAA Glider Data Assembly Center (DAC) to be integrated with other real-time observations for validation and assimilation into operational ocean models.
Drifters
Lamont Oceanographic Biogeochemical Observer (LOBO) is a robotic profiler that goes from the surface to depths of up to 1500m and measures temperature, conductivity (from which we calculate salinity), oxygen concentration, particle backscatter, and fluorescence due to chlorophyll and colored dissolved organic matter (CDOM). Measurements of temperature and salinity give us information about the physical characteristics of the water column and of oxygen, and CDOM of the chemistry and the chlorophyll concentration gives us a measure of phytoplankton biomass. These measurements, including particle backscatter, also inform us on water column processes.
LOBO does about two profiles every 24 hours and transmits all the data back to the lab every time it comes to the surface. It can be reprogrammed in terms of how deep it goes and how long it stays at any given depth while at sea. This helps us adjust and focus where in the water column we want to make measurements as well as ride subsurface ocean currents. We cannot steer LOBO in any way other than riding the currents; hence it is a Lagrangian drifter.